OGŁOSZENIA


The organizers of the 22nd Polish Control Conference (PCC) cordially invite you to the Poznan University of Technology located in the city of Poznań, Poland, where the most important event for the Polish community of automatic control will be hosted between 1-3 July of the year 2026 (https://pcc2026.put.poznan.pl). The PCC evolved from the National Control Conference (NCC) which started for the first time in the year 1958 in Warsaw, and has been organized in a three-year cycle. Build upon the long and rich history of the NCC, the Polish Control Conference becomes now a truly international event of a wide thematic scope focusing on all the aspects of automatic control, its applications and supporting technologies. The organizers believe that the international character of the PCC will enable us to outreach the scientific achievements of the Polish control community in the world-wide scale and will allow attracting the abroad researchers to discuss together the recent research results and establish the potential new cooperation threads within the international community.
The thematic scope of the PCC 2026 is wide and includes all the aspects related to automatic control with supporting technologies and their applications in automation and robotics, like:
- Linear and nonlinear feedback control design for dynamical systems
- Output feedback and observer design
- Optimal, stochastic, and constrained control
- Robust and adaptive autonomous systems under uncertainty
- Architectures of control systems
- Process diagnostics and fault tolerant control systems
- Stability and control performance analysis
- Safety, reliability and resilience issues in control systems
- Modelling and data-based identification of systems
- Sensing and measurement issues in automation and robotics
- Decision support and expert systems
- Machine learning methods and applications of artificial intelligence
- Human-machine cooperative control systems
- Control and perception systems for robots and autonomous vehicles
- Sensors, devices and tools in automation, control, and robotics
- Applications of control systems
- Automation for Industry 4.0, industrial control systems
- Social, educational, and economic issues of automatic control and robotics
MŁODZI, ZDOLNI Z GNIEZNA‼️
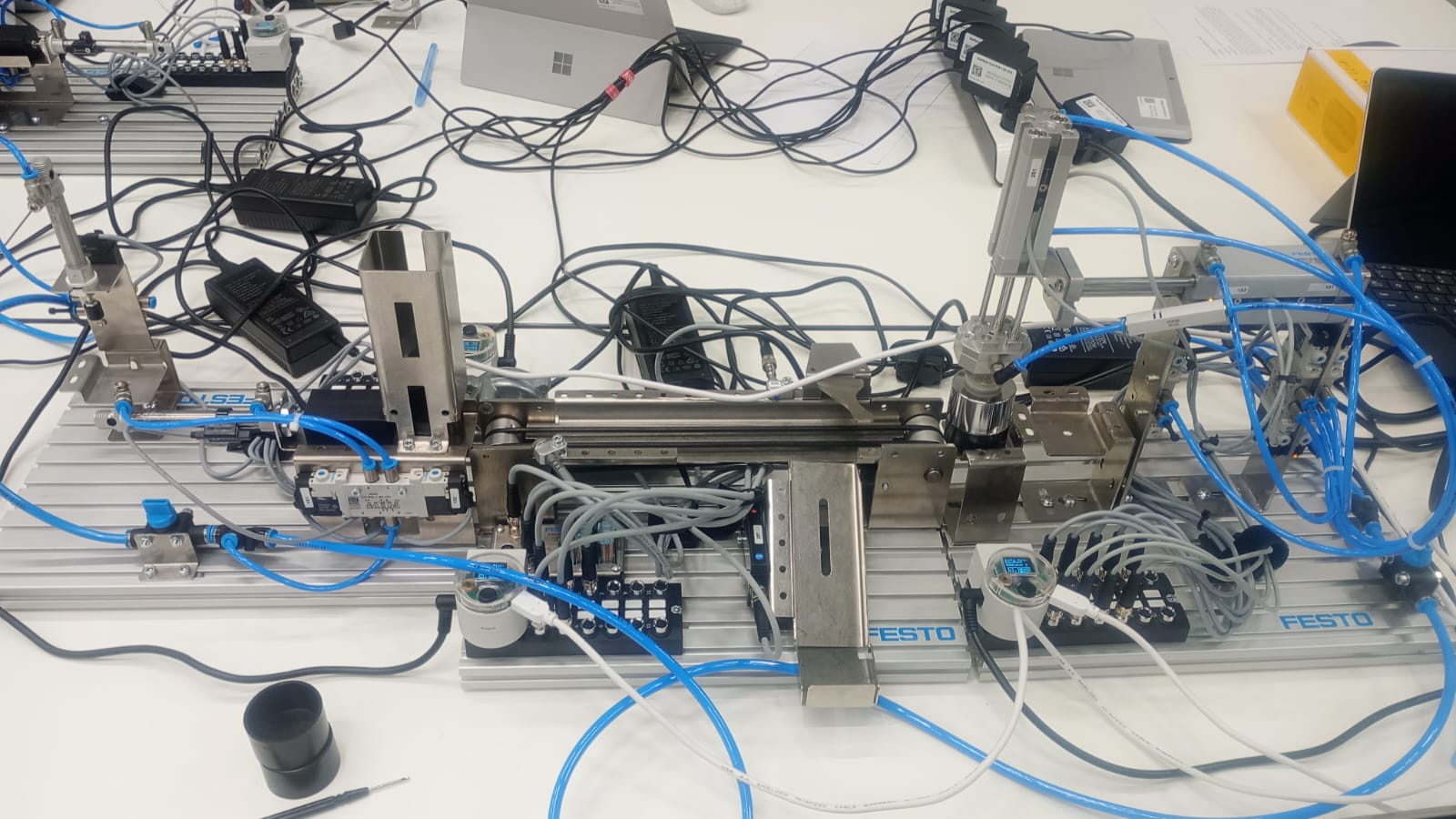
Dnia 24.01.2026 r. uczniowie szkół technicznych z Gniezna mieli okazję wziąć udział w zajęciach „Podstawy mechatroniki z zestawem MecLab”, prowadzonych przez dr. inż. Pawła Szulczyńskiego z Instytutu Automatyki i Robotyki.

✅ Zajęcia odbywają się w ramach projektu „Wsparcie Rozwoju Edukacji w Miejskim Obszarze Funkcjonalnym Gniezna”. Dofinansowany z funduszy europejskich (FEW 2021-2027) projekt to inicjatywa partnerska, mająca na celu podniesienie jakości kształcenia ogólnego i zawodowego.
✅ Projekt obejmuje bezpłatne, innowacyjne warsztaty z robotyki, programowania, druku 3D i multimediów dla uczniów, realizowane w centrum edukacyjnym „Stolica eXperymentu”.
✅ Zwieńczeniem spotkania był konkurs, w którym należało złożyć i oprogramować model linii produkcyjnej.
✅ Partnerami konkursu był Wydział Automatyki, Robotyki i Elektrotechniki Politechniki Poznańskiej wraz z firmą Festo.
Poziom rywalizacji był wysoki a o zwycięstwie zadecydowały minuty, dlatego gratulujemy wszystkim uczestnikom konkursu👏👏


 WYKŁAD OTWARTY PROF. DR INŻ. EDUARDO BAYRO-CORROCHANO DLA SPOŁECZNOŚCI AKADEMICKIEJ
WYKŁAD OTWARTY PROF. DR INŻ. EDUARDO BAYRO-CORROCHANO DLA SPOŁECZNOŚCI AKADEMICKIEJ
JM Rektor oraz Dziekan Wydziału Automatyki, Robotyki i Elektrotechniki zapraszają na wykład otwarty Prof. dr inż. Eduardo Bayro-Corrochano "Geometric Methods for Signal and Image Processing, Computer Vision, AI, Neurocomputing, Deep Learning, Quantum Computing, Nonlinear Control and Robotics ".
Wykład odbędzie się 15 stycznia (czwartek) o godz. 16.00 w sali 123 Biblioteki Technicznej
Prof. Dr. Bayro-Corrochano is an internationally recognized scholar and leading authority in the field of Geometric Cybernetics. His research focuses on the theoretical development and practical application of Clifford geometric algebras to a broad spectrum of domains, including pattern recognition, image processing, computer vision, artificial intelligence, neurocomputing, machine learning, control theory, robotics, and quantum computing.
He has made numerous pioneering contributions, among them the geometric multilayer perceptron (MLP), Clifford Support Vector Machines, quaternion-based quantum neural networks, and quaternion spike neural networks for pattern recognition and neuro-control. His work also includes the formulation of the Quaternion Wavelet Transform and Quaternion Fourier Transform grounded in space–time metrics, as well as the Quaternion Fractional FFT and Quaternion Quantum FFT for advanced color image processing. Furthermore, he has developed novel interpolation techniques for geometric entities—such as lines, planes, circles, spheres, and hyperplanes—based on motor algebra (SE(3)) and Bézier methods defined on the Study manifold. He has supervised numerous research projects and published extensively on quaternion wavelets for image processing, as well as on deep learning and quantum computing methods for medical imaging, medical robotics, mobile robotics, grasping, manipulation, quadrotor systems, and humanoid robotics.
In geometric algebra, his contributions span kinematics, dynamics, Euler–Lagrange and Newton–Euler recursive algorithms, port-Hamiltonian frameworks, and the application of the Koopman operator for phase-space computation. His work has had a substantial impact on nonlinear control, particularly in robot vision and general robotic systems. He is also a strong proponent of geometric quantum computing formulated within the Clifford geometric algebra framework.
His scientific legacy is prominently reflected in three of his eight authored books:
• Geometric Algebra Applications Vol. I: For Graphics, Vision, and Neurocomputing (Springer, 2018)
• Geometric Algebra Applications Vol. II: Robot Modelling and Control (Springer, 2019)
• Geometric Algebra Applications Vol. III: Integral Transforms for Science and Engineering (Springer, 2024)
These volumes serve as foundational references for graduate-level education and as influential resources for researchers and engineers in cybernetics and related disciplines.
Prof. Bayro-Corrochano has served as Associate Editor for the IEEE Transactions on Neural Networks and Learning Systems and the Journal of Mathematical Imaging and Vision, and he serves on the editorial boards of Pattern Recognition and Robotica. His accomplishments have been recognized by the State of Jalisco, Mexico, with the First Prize in Science and Technology in 2003 and 2009. He is a Fellow of the International Association of Pattern Recognition (IAPR), a Senior Member of the IEEE, and has been appointed to the IEEE Robotics and Automation Society (RAS) Administrative Committee as the Representative for GEO Area 1.
He has played significant organizational roles in leading international conferences, including serving as General Chair of ICPR 2016 (December 4–8, Cancun, Mexico) and IEEE/RAS Humanoids 2016 (November 15–17, Cancun, Mexico). He will also serve as General Chair of IEEE/RAS ICRA 2028 in Guadalajara, Mexico.


ZAPRASZAMY NA CYKL WYKŁADÓW PROWADZONYCH PRZEZ PROF. DRA INŻ. EDUARDO JOSE BAYRO CORROCHANO
📣 ZAPRASZAMY NA CYKL WYKŁADÓW ‼️ | Wydział Automatyki, Robotyki i Elektrotechniki

„Łączy nas… nauka”
Politechnika Poznańska
Projekt: „Aerosfera 2.0 Stanowisko obserwacji, nadzoru i śledzenia obiektów satelitarnych Politechniki Poznańskiej

KONFERENCJA SPA

Signal Processing: Algorithms, Architectures, Arrangements and Applications
https://www.spaconference.org.pl/
KIERUNEK AUTOMATYKA I ROBOTYKA NA I MIEJSCU W POLSCE
Z przyjemnością informujemy, że w 26. Rankingu Szkół Wyższych i Rankingu Kierunków Studiów Perspektywy 2025 kierunek Automatyka i robotyka znalazł się na 1. miejscu w Rankingu Kierunków. Dyplom odebrał dr hab. inż. Stefan Brock, prof. PP – Prodziekan ds. kształcenia.
Politechnika Poznańska znalazła się na 8. miejscu w rankingu wśród uczelni akademickich w roku 2025. Wśród uczelni technicznych PP jest na miejscu 5.!!!
Więcej szczegółów na stronie: https://2025.ranking.perspektywy.pl/

fot. Anita Kot/Perspektywy

![]()
Instytut Automatyki i Robotyki wraz z firmą KUKA zaprasza na
KURS PROGRAMOWANIA ROBOTÓW

Formularz rejestracji na KURS PROGRAMOWANIA ROBOTÓW Programowanie 1 KSS 8.x (KR C4)

Rektor Politechniki Poznańskiej zaprasza na wykład otwarty pt. "Zautomatyzowane pojazdy przegubowe: kinematyka i sterowanie ", który wygłosi prof. dr hab. inż. Maciej Michałek z Wydziału Automatyki, Robotyki i Elektrotechniki. Wykład odbędzie się 15 maja (czwartek) o godzinie 16:00 w sali nr 401 budynku Mechatroniki.
Biogram:
Maciej Marcin Michałek uzyskał stopnie doktora nauk technicznych oraz doktora habilitowanego nauk technicznych w Politechnice Poznańskiej w dyscyplinie automatyka i robotyka odpowiednio w latach 2006 i 2015. Pracuje na stanowisku profesora w Instytucie Automatyki i Robotyki na Wydziale Automatyki, Robotyki i Elektrotechniki Politechniki Poznańskiej. Wypromował 2 doktorów; aktualnie jest promotorem doktoratu typu 'cotutelle' realizowanego w ramach współpracy polsko-francuskiej. Jego dotychczasowe zainteresowania badawcze obejmują: (1) projektowanie układów sterowania dla systemów dynamicznych, w szczególności systemów nieholonomicznych, robotów mobilnych, pojazdów inteligentnych oraz wieloczłonowych struktur przegubowych z uwzględnieniem ograniczeń nałożonych na stan i sterowanie, (2) rozwój i zastosowania odpornych/adaptacyjnych układów sterowania w metodyce ADRC (ang. Active Disturbance Rejection Control), a także (3) modelowanie oraz identyfikację systemów dynamicznych. Jest autorem metodyki VFO (ang. Vector-Field-Orientation) służącej do projektowania algorytmów sterowania dla systemów nieholonomicznych. Prof. Michałek należy do międzynarodowej organizacji IEEE (od roku 2009), aktualnie w randze Senior Member. W kadencjach 2020-2021 oraz 2022-2023 przewodniczył Polskiemu Oddziałowi IEEE Robotics & Automation Society. Był członkiem rad redakcyjnych takich czasopism jak Journal of Intelligent & Robotic Systems (lata 2011-2023) oraz Journal of the Franklin Institute (lata 2020-2022). Obecnie służy jako redaktor stowarzyszony (ang. associate editor) dla IEEE Control Systems Society Conference Editorial Board a także dla czasopism Pomiary-Automatyka-Robotyka, IEEE Transactions on Cybernetics oraz IEEE Transactions on Aerospace and Electronic Systems.

![]()
Instytut Automatyki i Robotyki wraz z firmą KUKA ogłasza
IV edycję Konkursu
na najlepszą aplikację z zastosowaniem robotów przemysłowych
Do udziału w Konkursie zapraszamy studentów kierunku Automatyka i Robotyka.
Ocenie podlegać będzie rozwiązanie zadania konkursowego
Nagrodą dla dwóch NAJLEPSZYCH FINALISTÓW jest uczestnictwo w
Zjeździe Edukacyjno-Technologicznym dla studentów i nauczycieli
który odbędzie się w siedzibie firmy KUKA w Tychach w terminie 26 i 27 listopada 2024 r.
Na uczestników czekają praktyczne warsztaty z zakresu obsługi i programowania robotów, prezentacja Zrobotyzowanego Centrum Aplikacyjnego - możliwość zdobycia nowych przydatnych praktycznych umiejętności.
Termin zgłaszania prac do Konkursu upływa w dniu 20.11.2024 roku
Rozwiązanie zadania konkursowego wraz z kompletem dokumentów wymienionych w regulaminie należy przesłać, na adres: konkurs_kuka@put.poznan.pl.
Oceniać będziemy najlepsze wykorzystanie możliwości dostępnych w KUKA.Sim oraz najbardziej kreatywne podejście do zastosowania robota w aplikacji.
Rozstrzygnięcie Konkursu nastąpi 22.11.2024r.
Prace zwycięzców wezmą udział w KONKURSIE OGÓLNOPOLSKIM gdzie nagrodą jest udział w szkoleniu organizowanym przez College KUKA w Tychach.
 ZAPRASZAMY!
ZAPRASZAMY! 
Oprogramowanie KUKA.Sim w wersji trial znajdziesz do pobrania tutaj:
KUKA.Sim – oprogramowanie do symulacji
Dokumentacja:
Wszystkie Link do plików wymagają rejestracji na portalu my.kuka.com Login | my.KUKA
KR IONTEC Assembly Instructions https://xpert.kuka.com/ID/PB14091 KUKA Xpert Login
(4.15 Drogi zatrzymania i czasy zatrzymania)
KUKA.SafeOperation Assembly and Operating Instructions https://xpert.kuka.com/ID/PB14570
Dane CAD:
Reference switch https://xpert.kuka.com/ID/CAD1264
Axis limitation https://xpert.kuka.com/ID/CAD1311
Samouczki:
KUKA.Sim 4.1 konfiguracja SAFE Operation Część 1: Aktywacja, obszar komórek i konfiguracja narzędzi
KUKA.Sim 4.1 konfiguracja SafeOperation Część 2: Przestrzenie mon., pozycja refer., mon. prędkości.
KUKA.Sim 4.1 konfiguracja SafeOperation Część 3: Eksport do WorkVisual i KUKAStopServices
Samouczek KUKA.Sim - Bezpieczna obsługa 4: Przerwanie przed obszarami o ograniczonym dostępie (BBRA)
Samouczek KUKA.Sim - Bezpieczna obsługa 5: Profinet i konfiguracja sterownika PLC bezpieczeństwa


XIII edycja międzynarodowych warsztatów RoMoCo
W lipcu bieżącego roku na Politechnice Poznańskiej zostanie zorganizowana XIII edycja międzynarodowych warsztatów Robot Motion and Control (RoMoCo). Tematyka warsztatów określona jest na stronie https://romoco.put.poznan.pl/ w oraz załączonym dokumencie Call for Paper (CFP).

Miło nam poinformować, że w jubileuszowym ogólnopolskim 25. Rankingu Szkół Wyższych i Rankingu Kierunków Studiów Perspektywy 2024 1. miejsce zajął kierunek Automatyka i robotyka Politechniki Poznańskiej.
Dyplom za 1. miejsce kierunku Automatyka i robotyka odebrał dr hab. inż. Sławomir Stępień, prof. PP z Instytutu Automatyki i Robotyki Wydziału Automatyki, Robotyki i Elektrotechniki Politechniki Poznańskiej.
Ranking Szkół Wyższych Perspektywy 2024

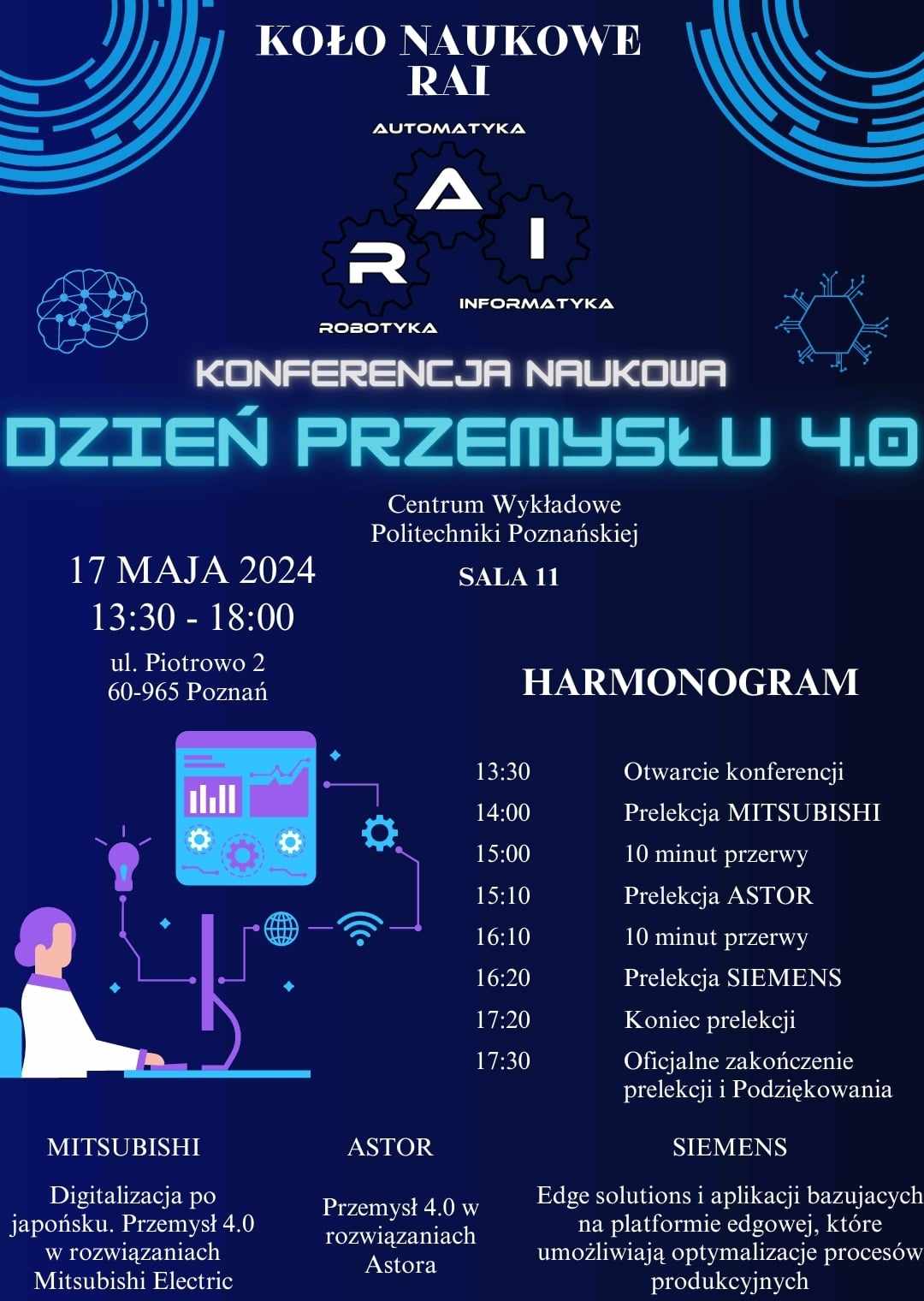
KONFERENCJA Dzień Przemysłu 4.0
Koło Naukowe Robotyka Automatyka Informatyka ma przyjemność zaprosić Wszystkich studentów i doktorantów Politechniki Poznańskiej na konferencję Dzień Przemysłu 4.0 która odbędzie się 17 maja 2024 w sali CW11 w Centrum Wykładowym Politechniki Poznańskiej!
Jest to niezwykłe wydarzenie skupiające się na popularyzacji Przemysłu 4.0 i nowoczesnych rozwiązań technologicznych stosowanych przez liderów w branży. Nasza konferencja jest świetną okazją do odwiedzenia stanowisk przygotowanych przez zaproszone przez nas firmy Astor, Mitsubishi Electric oraz Siemens wraz z uczestnictwem w organizowanych przez nie fascynujących prelekcjach, a także niepowtarzalną możliwością do zadawania pytań i wymiany doświadczeń!
Zapraszamy do rejestracji w wydarzeniu w formularzu poniżej oraz do zapoznania się z harmonogramem konferencji.
FORMULARZ REJESTRACYJNY:
Dzień Przemysłu 4.0 - rejestracja uczestników (google.com)
Do zobaczenia na Dniu Przemysłu 4.0!
WYKŁAD OTWARTY PROFESORA DR. HAB. INŻ. PRZEMYSŁAWA HERMANA
Rektor Politechniki Poznańskiej oraz Instytut Automatyki i Robotyki zapraszają na wykład otwarty prof. dr. hab. inż. Przemysława Hermana, pt. „Transformacja prędkości w układach dynamicznych: wybrane zagadnienia”, który odbędzie się w czwartek 16 maja 2024 r. o godz. 16.00 w Sali 401 Centrum Mechatroniki.
Profesor Przemysław Herman pracuje w Instytucie Automatyki i Robotyki na Wydziale Automatyki, Robotyki i Elektrotechniki Politechniki Poznańskiej. Jego zainteresowania badawcze obejmują przede wszystkim zagadnienia związane z robotyką. W początkach działalności naukowej prowadzonej na Politechnice Poznańskiej zajmował się metodami transformacji prędkości stosowanymi w równaniach dynamiki oraz ich wykorzystaniem do celów sterowania manipulatorami. W późniejszej działalności jego prace dotyczyły zastosowań zmiennych wynikających z transformacji prędkości do innych modeli układów dynamicznych jak: podwodne pojazdy morskie, poduszkowce, czy sterowce laboratoryjne. W kręgu jego zainteresowań są również niektóre układy nieliniowe z niepełnym wymuszeniem, czyli manipulatory, w których nie ma możliwości sterowania we wszystkich złączach.


XIII edycja międzynarodowych warsztatów RoMoCo
W lipcu bieżącego roku na Politechnice Poznańskiej zostanie zorganizowana XIII edycja międzynarodowych warsztatów Robot Motion and Control (RoMoCo). Tematyka warsztatów określona jest na stronie https://romoco.put.poznan.pl/ w oraz załączonym dokumencie Call for Paper (CFP).
Uwaga! Termin nadsyłania referatów zostanie przedłużony o ok. 14 dni względem pierwszej daty podanej w CFP.
![]()
ROZSTRZYGNIĘCIE I ETAPU KONKURSU
(III edycja)
na najlepszą aplikację z zastosowaniem robotów przemysłowych
1 miejsce - Wiktor Nowacki
2 miejsce - Dominik Gołemberski
3 miejsce - Kacper Krasiński
 |  |
Gratulujemy i zapraszamy na "Zjazd Edukacyjno-Technologiczny dla studentów i nauczycieli"
do Centrum Szkoleniowego KUKA w Tychach.
GRATULUJEMY
Kapituła Konkursu
![]()
Instytut Automatyki i Robotyki wraz z firmą KUKA ogłasza
III edycję Konkursu
na najlepszą aplikację z zastosowaniem robotów przemysłowych
Do udziału w Konkursie zapraszamy studentów kierunku Automatyka i Robotyka.
Ocenie podlegać będzie rozwiązanie zadania konkursowego
Nagrodą dla dwóch NAJLEPSZYCH FINALISTÓW jest uczestnictwo w
Zjeździe Edukacyjno-Technologicznym dla studentów i nauczycieli
który odbędzie się w siedzibie firmy KUKA w Tychach w terminie 06-07 września 2023 r.
Na uczestników czekają praktyczne warsztaty z zakresu obsługi i programowania robotów, prezentacja Zrobotyzowanego Centrum Aplikacyjnego - możliwość zdobycia nowych przydatnych praktycznych umiejętności.
Termin zgłaszania prac do Konkursu upływa w dniu 31.07.2023 roku
Rozwiązanie zadania konkursowego wraz z kompletem dokumentów wymienionych w regulaminie należy przesłać, na adres: konkurs_kuka@put.poznan.pl.
Oceniać będziemy najlepsze wykorzystanie możliwości dostępnych w KUKA.Sim oraz najbardziej kreatywne podejście do zastosowania robota w aplikacji.
Rozstrzygnięcie Konkursu nastąpi 05.08.2023r.
Prace zwycięzców wezmą udział w KONKURSIE OGÓLNOPOLSKIM gdzie nagrodą jest udział w szkoleniu organizowanym przez College KUKA w Tychach.
ZAPRASZAMY!
Zobacz przykładową symulację zadania, wykonaną w KUKA.Sim: symulacja zadania konkursowego KUKA
Oprogramowanie KUKA.Sim w wersji trial znajdziesz do pobrania tutaj:
KUKA.Sim – oprogramowanie do symulacji

![]()
Warsztaty programowania robotów offline
Zapraszamy na warsztaty programowania robotów firmy KUKA w programie KUKA.Sim. Spotykamy się na Politechnice Poznańskiej w poniedziałek 12 czerwca w sali 209 budynku A3 (bez zegara). Zaczynamy o 9:45 i kodujemy oraz symulujemy do 13:15 z 15 minutową przerwą o 11:15.
Na warsztaty przyjdź z własnym komputerem z zainstalowanym programem KUKA.Sim 4.
Program dostępny jest w wersji testowej na portalu my.KUKA.com (po darmowej rejestracji na 30 dni).
KUKA.Sim 4:  Category: Simulation (kuka.com)
Category: Simulation (kuka.com)
12 czerwca | 9:45 – 13:15 | sala 209
Zapraszamy do uczestnictwa
Instytut Automatyki i Robotyki
![]()
KURS PROGRAMOWANIA ROBOTÓW
Zapraszamy na kurs programowania robotów firmy KUKA
Programowanie 1 KSS 8.x (KR C4)
Kurs odbywa się w certyfikowanym laboratorium w sali 426 (Budynek A3). Prowadzony jest przez profesjonalnie przygotowanych wykładowców.
Kurs kończy się egzaminem praktycznym jak i teoretycznym. Egzamin przeprowadzany jest w języku polskim przez pracowników KUKA College Poland. Uczestnicy po pozytywnym zaliczeniu kursu otrzymają imienne certyfikaty wystawiane przez firmę KUKA Roboter GmbH.
Czas trwania: 4 dni od 8:00 do 16:00 (32 godz.) plus egzamin ok 1 godz.
Termin: w czasie przerwy semestralnej (01.07 – 15.09) w grupach 4-6 osobowych.
!!! Zbierz grupę i ustal dla niej indywidualny termin !!!
Koszt: dla studentów z całej Polski : 2500 zł
dla studentów AiR PP spec. SSiR oraz SAiR (24 godz.): 2000 zł
Zalety kursu:
kurs przygotowany efektywnie pod względem metodycznym i dydaktycznym,
wiedza pochodząca z praktyki i przekazywana w praktyce,
standardy szkoleniowe z globalnym certyfikatem.
Program: na stronie KUKA College

Instytut Automatyki i Robotyki wraz z firmą KUKA ogłasza
II edycję Konkursu
na najlepszą aplikację z zastosowaniem robotów przemysłowych
Do udziału w Konkursie zapraszamy studentów kierunku Automatyka i Robotyka.
Ocenie podlegać będzie rozwiązanie zadania konkursowego
Nagrodą dla TRZECH NAJLEPSZYCH FINALISTÓW jest uczestnictwo w
Zjeździe Edukacyjno-Technologicznym dla studentów i nauczycieli
który odbędzie się w siedzibie firmy KUKA w Tychach w terminie 13-15 września 2022 r.
Na uczestników czekają praktyczne warsztaty z zakresu obsługi i programowania robotów, prezentacja Zrobotyzowanego Centrum Aplikacyjnego - możliwość zdobycia nowych przydatnych praktycznych umiejętności.
Termin zgłaszania prac do Konkursu upływa w dniu 31.07.2022 roku.
Rozwiązanie zadania konkursowego wraz z kompletem dokumentów wymienionych w regulaminie należy przesłać, na adres: konkurs_kuka@put.poznan.pl .
Rozstrzygnięcie Konkursu nastąpi 17.08.20212 roku.
ZAPRASZAMY!
Zaproszenie na Zjazd Edukacyjno-Technologiczny dla studentów i nauczycieli
ROZSTRZYGNIĘCIE I ETAPU KONKURSU (na Politechnice Poznańskiej)
1 miejsce - Wiktor Piechowiak
2 miejsce - Krzysztof Borowczak
3 miejsce - nie przyznano
Gratulujemy i zapraszamy na "Zjazd Edukacyjno-Technologiczny dla studentów i nauczycieli" do Centrum Szkoleniowego KUKA w Tychach
GRATULUJEMY ![]()
![]() Kapituła Konkursu
Kapituła Konkursu
STUDENCI WARIE NA PODIUM
Zwycięzcami ogólnopolskiego konkursu na najlepszą aplikację z zastosowaniem robotów przemysłowych, organizowanego przez Firmę KUKA zostali:

1 miejsce - Wiktor Piechowiak
Nagroda voucher na szkolenie:
Programowanie 1
Programowanie 2
2 miejsce - Krzysztof Borowczak
Nagroda voucher na szkolenie:
Programowanie 1
Wykład pt. "Interdisciplinary Challenges of Mechatronic Systems Design"
W dniu 8 czerwca odbył się wykład pt. "Interdisciplinary Challenges of Mechatronic Systems Design" skierowany do studentów II stopnia AiR specjalności SSiR i SAAS. Prelegentem był Dipl. Ing. Christoph Mueller, PhD - właściciel i prezes firm MobileTronic oraz MT-Silesia, dostarczających rozwiązania przemysłowe z zakresu nowych technologii z siedzibą w Niemczech i w Polsce. Ponadto jest udziałowcem i prezesem firmy VirtuRail, producenta elektrycznych pojazdów do zautomatyzowanego transportu z siedzibą w Austrii.
Tematyka wykładu obejmuje praktyczne przykłady, ilustrujące wyzwania jakie pojawiają się podczas projektowania systemów mechatronicznych i robotycznych. Omawia potencjalne błędy w procesie projektowania oraz przedstawia wskazówki wypływające z praktyki inżynierskiej, dotyczące sposobów projektowania nowoczesnych i wysoce zautomatyzowanych systemów autonomicznych w celu zapewnienia efektywnej i terminowej realizacji projektów.